AutoRobXL startet in die zweite Phase
Ein gute Nachricht für das ZIM-Innovationsnetzwerk AutoRobXL: Die zweite Phase des Netzwerkes startet zum 1. November 2024. AutoRobXL (https://autorobxl.de) hat nun den offiziellen Förderbescheid vom Bundesministerium für Wirtschaft und Klimaschutz (BMWK) erhalten.
In dieser zweiten Phase wird das Netzwerk über weitere zwei Jahre Technologien und Anwendungen für die Automatisierung und Digitalisierung der Großraum-Robotik auf der Baustelle entwickeln und die gemeinsamen Kompetenzen erweitern. Damit leistet das Netzwerk einen Beitrag zur Beschleunigung von Bauprojekten und zur Steigerung der Arbeitssicherheit auf Baustellen.
„Mit dieser Unterstützung können die Partnerschaften zwischen den beteiligten Unternehmen und Forschungseinrichtungen weiter gefördert werden, um praxistaugliche Automatisierungs-Lösungen für die Herausforderungen der Bauwirtschaft zu entwickeln.“ sagt Netzwerkmanager Dr. Manfred Andreas Baumgaertner. „Die Phase 2 verspricht, wichtige Beiträge zur Entwicklung (teil)autonomer mobiler Arbeitsmaschinen zu leisten.“ erwartet Prof. Frank Will, Inhaber der Professur für Baumaschinen des Netzwerkpartners Technische Universität Dresden. „Darüber soll unsere gemeinsame Arbeit positive Impulse für die gesamte Branche geben und dazu beitragen, Deutschland als Vorreiter bei der Automatisierung der Baustelle zu positionieren.“
Die AutoRobXL-Netzwerkpartner:
AMR-Hydraulik Chemnitz GmbH
ATLAS GmbH
Eckerle Technologies GmbH
GEMAC Chemnitz GmbH
Günter Till Präzisionsmechanik GmbH
Hermann Paus Maschinenfabrik GmbH
HYDAC Group
Hydrive Engineering GmbH
IBL-HYDRONIC GmbH und Co.KG GmbH & Co. KG
MOBA Mobile Automation AG
SCHWING Group
Weiss Mobiltechnik GmbH
Forschungseinrichtungen:
Technische Universität Dresden mit den Lehrstühlen:
Professur für Baumaschinen
Professur für Fluid-Mechatronische Systemtechnik | Fluidtronik
Professur für Werkzeugmaschinenentwicklung und adaptive Steuerungen (LWM), TU Dresden
Professur für Elektrische Maschinen und Antriebe
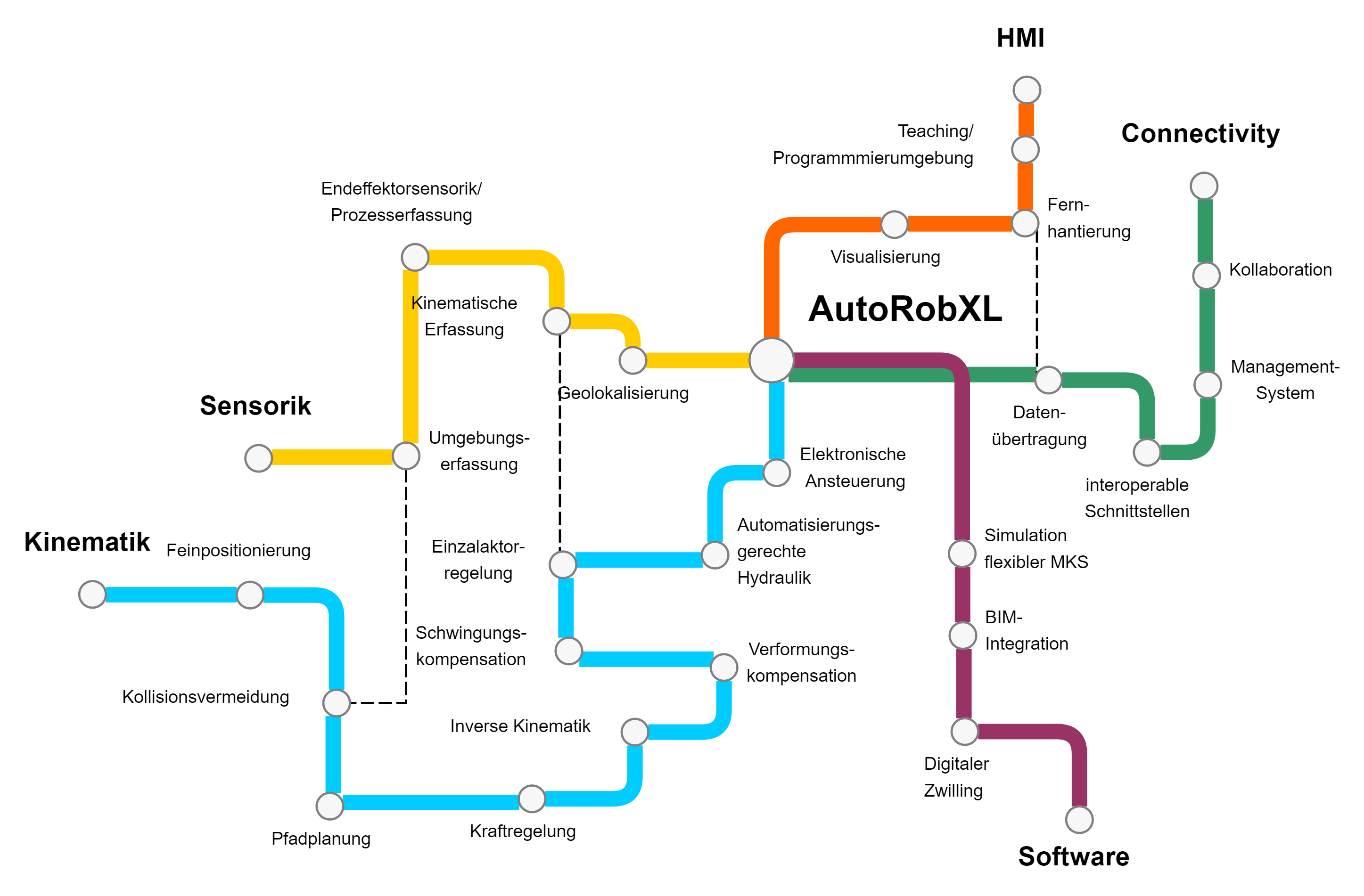
Das ZIM-Innovationsnetzwerk AutoRobXL verfolgt das Ziel, automatisierte Arbeitsprozesse mittels mobiler Arbeitsmaschinen und Großraummanipulatoren zu realisieren. Unter Großraummanipulatoren werden lange oftmals elastische Auslegerstrukturen verstanden, welche z. T. starken Verformungen und Schwingungen unterliegen. Beispiele hierfür sind Autobetonpumpen, Mobilkrane oder Hubsteiger. Eine hohe Bewegungsgenauigkeit und präzise Positionierung entsprechender Strukturen sind bereits für manuelles Arbeiten wichtig, für die Automatisierung der zugehörigen Arbeitsprozesse sind diese unerlässlich. Im Rahmen des Netzwerks sollen deshalb neue Lösungen entwickelt werden, welche eine positionsgenaue Steuerung entsprechender Auslegerstrukturen sowie der zugehörigen Arbeitswerkzeuge ermöglichen. Darauf aufbauend wollen wir die Webseite des AutoRobXL-Innovationsnetzwerkes sukzessive zu einer Entwicklerplattform für die Automatisierung großer Baumaschinen ausbauen.